Pilote automatique
Le MCR 01: notre passion partagée :: Construction :: Pendant la construction et l'évolution de votre MCR :: Instrumentation et avionique :: Pilote automatique
Page 5 sur 6 •  1, 2, 3, 4, 5, 6
1, 2, 3, 4, 5, 6
Re: Pilote automatique
Admin Mer 03 Fév 2010, 20:25
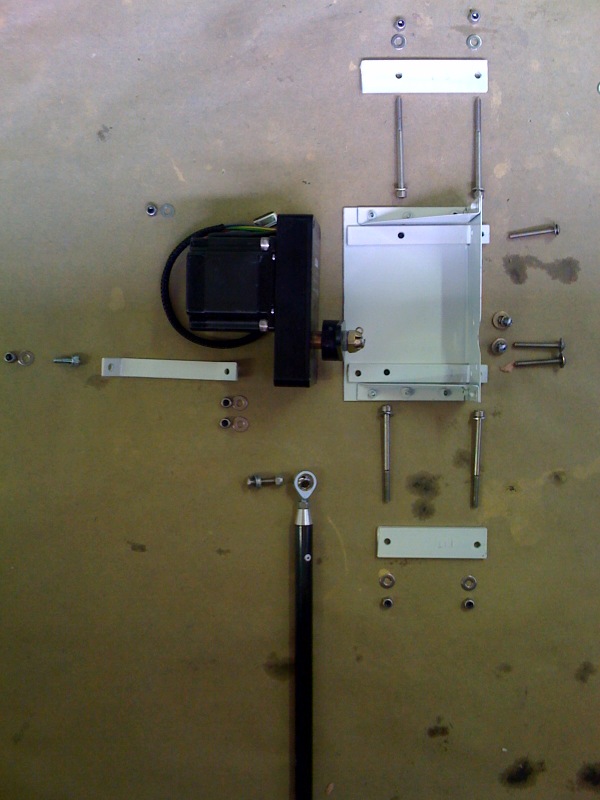
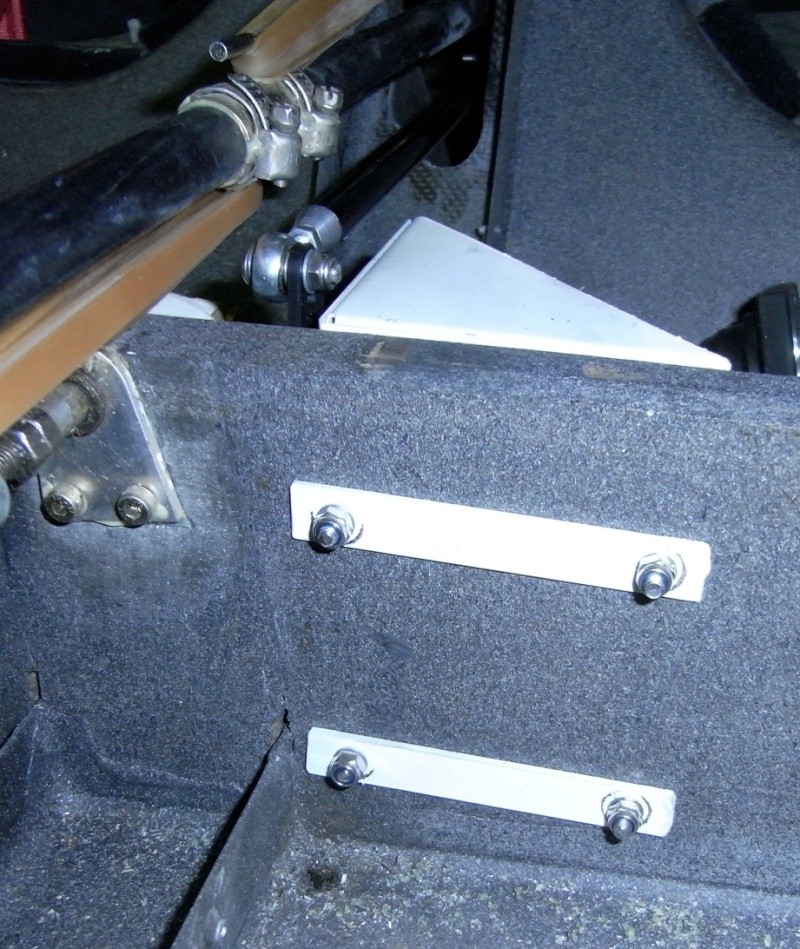
Après avoir traité les racks au chromate de zinc, je les ai peint en blanc.
J'ai aussi équipé mes deux servos de prises de connexion de type D9. La technique utilisée a été développée lors de ce sujet: https://mcr01passion.forumperso.com/instrumentation-f7/d-sub-de-dynon-mode-d-emploi-t101.htm
Voici donc les pièces que j'ai faites pour le montage des deux servos:

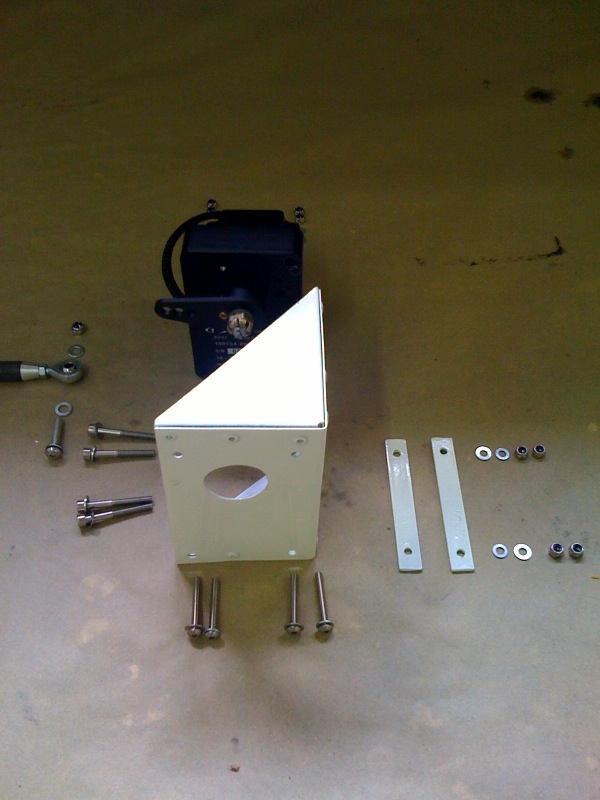
"Eclaté" et montage du rack de roulis:



J'ai aussi inséré de la mousse double-face entre le rack et la lame de train pour éviter tout glissement.
"Eclaté" et montage du rack de tangage:



Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -

Re: Pilote automatique
Admin Dim 28 Fév 2010, 08:50
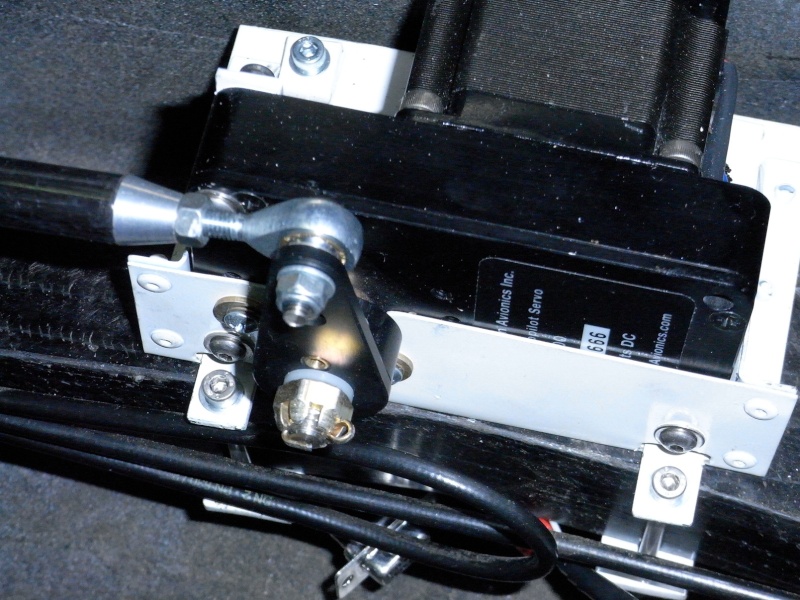
Voilà les photos de synthèse de l'installation terminée:
Donc le servo de roulis est installé sur la lame de train avec un rack perso, raccordé au pied de manche opposé par une biellette carbone. La position du siège la plus basse n'empêche pas le déplacement complet des commandes et du servo. L'embiellage est monté sur rotules.

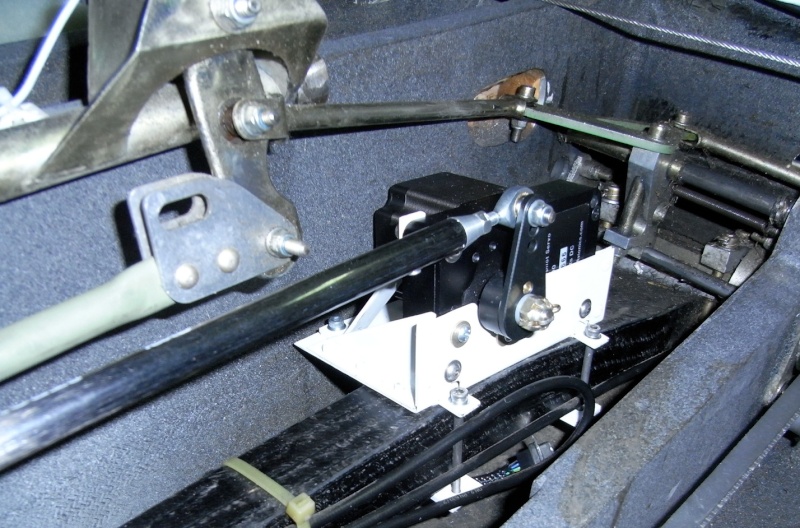

Pour le servo de profondeur, je me suis raccordé sur le renvoi de commande de profondeur. Le rack perso est monté sur le couple arrière des sièges. Cette position (plutôt que derrière le couple arrière du cockpit) a été choisi pour ramener au maximum le poids vers l'avant. Le montage est ensuite très similaire à celui du servo de roulis. Tout la partie mobile a été caché dans le tunnel central, la partie du servo qui est visible sera protégée par un capot en Klégécel et fibre pour éviter d'être bousculer par les bagages...




Je vous tiens au courant des essais, des réglages trouvés, et surtout des sensations
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
navion78 Mar 02 Mar 2010, 10:53
superbe réalisation.
sinon quel model de servos moteur as tu utilisé car il me semble qu'il y a plusieurs références chez dynon?
Combien de breakers faut il instaler et de quel puissance?
J'ai hate de voir cela en fonction.
à bientôt.
sylvain

navion78- Nombre de messages : 365
Localisation : LFPX, LFBX
Constr./proprio. : PROPRIO MCR n°17
Date d'inscription : 19/03/2008
Re: Pilote automatique
pschlappy Mar 02 Mar 2010, 20:25
Pierre S.

pschlappy- Nombre de messages : 52
Localisation : LSGN - Neuchâtel - Suisse
Constr./proprio. : Proprio MCR-4S, Dynon 180, AP74, Garmin 695
Date d'inscription : 16/04/2009 -
Re: Pilote automatique
Admin Mar 02 Mar 2010, 22:57
pschlappy a écrit:Après quelques problèmes de câblage
Moi, j'ai, semble-t-il, aussi des problèmes de câblage. J'ai dû inverser des connexions DSAB A et DSAB B. A la réinitialisation du DSAB, le D100 ne retrouve pas les autres éléments, dont le HS34 dont je n'ai pourtant pas du tout changé le câblage. Il est passé en "standalone", cela fonctionne mais seul... Je vais devoir chercher. Quel avait été votre problème? Quelle solution?
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
Admin Mar 02 Mar 2010, 23:05
navion78 a écrit:quel model de servos moteur as tu utilisé car il me semble qu'il y a plusieurs références chez dynon?
Combien de breakers faut il instaler et de quel puissance?
j'ai choisi deux SV32, grâce aux informations de Cédric qui avait un trutrak. Il semblerait que tout ceux qui se sont lancés dans l'installation du système Dynon (MCR01 et MCR4S) se soient procurés les SV32.
J'ai mis un seul breaker de 2A pour les deux servos, un de 3A pour l'AP74. J'ai utilisé du câblage de jauge 22AWG. Pour les longueurs de câbles utilisées, cela est largement suffisant, d'après Dynon, mais j'avoue que je suis un peu étonné pas le 2A pour les servos. Je fais donc l'essai, et si je vois qu'il saute, je referai des calculs plus précis.
Et vous autres, déjà utilisateurs de PA Dynon, qu'avez-vous mis comme breakers et câbles?
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
pschlappy Mar 02 Mar 2010, 23:32
Le problème était un peu semblable : Le Dynon D180 fonctionnait bien avec les servos seuls, mais ne les commandait plus dès quel l'AP74 était branché, alors que les ordres donnés par celui-ci étaient reconnus et affichés par le D180. Le système étant sous garantie DA, c'est leur labo radio qui a fini par débugger le tout. Ils ont mentionné un problème de mise à la masse des différents appareils, mais n'étant pas présent lors de la réparation je n'en connais pas le détail. A signaler toutefois que le bus DSAB doit être câblé en paire torsadée.Admin a écrit: Moi, j'ai, semble-t-il, aussi des problèmes de câblage. J'ai dû inverser des connexions DSAB A et DSAB B. A la réinitialisation du DSAB, le D100 ne retrouve pas les autres éléments, dont le HS34 dont je n'ai pourtant pas du tout changé le câblage. Il est passé en "standalone", cela fonctionne mais seul... Je vais devoir chercher. Quel avait été votre problème? Quelle solution?
pschlappy- Nombre de messages : 52
Localisation : LSGN - Neuchâtel - Suisse
Constr./proprio. : Proprio MCR-4S, Dynon 180, AP74, Garmin 695
Date d'inscription : 16/04/2009 -
Re: Pilote automatique
Admin Mer 03 Mar 2010, 19:34
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
David Mer 03 Mar 2010, 20:19
La gauge22 est bien suffisante pour ce bus.
David
David- Nombre de messages : 18
Age : 50
Localisation : LFCD
Constr./proprio. : Utilisateur en club d'un MCR4S
Date d'inscription : 26/12/2009
Re: Pilote automatique
Admin Mar 11 Mai 2010, 14:57
Par contre, j'ai quand même trouvé un début de réponse à mon problème.
Il y avait un mauvais contact, que j'ai pu corrigé, ce qui fait que maintenant, tout communique, sauf le servo de roulis... Sûrement une autre panne, ce qui explique pourquoi j'ai eu tant de mal à trouver l'origine, car elle double.
Je suppose qu'il y a encore une mal-donne sur ma connection de mon servo de roulis, mais je me suis arrêté là... J'ai hâte de rentrer pour pouvoir trouver le hic, faire les premiers calibrages et enfin, les premiers essais...
A bientôt...
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
navion78 Sam 08 Jan 2011, 19:11
navion78- Nombre de messages : 365
Localisation : LFPX, LFBX
Constr./proprio. : PROPRIO MCR n°17
Date d'inscription : 19/03/2008
Re: Pilote automatique
Dominique Dim 09 Jan 2011, 17:57
Nos PA marchent impeccablement. Le mien au moins... 2 dynon SV32 1 ap74 le tout relié au GPS garmin496 et au dynon d10a.
Un petit dossier à La DGAC pour être en règle. 5 heures d'essai demandés. Ils sont faits et j'attends le document officiel. Mon collègue de hangar qui a suivi la même procédure a reçu son document définitif autorisant le montage mardi dernier.
Le fonctionnement est parfait aussi bien en tenue de cap qu'en tenue d'altitude. Bref je suis enchanté.
Mon montage est quasi identiques à ceux vu plus haut dans ce sujet.
Dominique

Dominique- Nombre de messages : 315
Age : 74
Localisation : Cholet
Constr./proprio. : constructeur mcr01vla 14 co-constructeur mcr01UL 5 proprio MCR4S 87
Date d'inscription : 01/12/2008
Re: Pilote automatique
navion78 Lun 10 Jan 2011, 16:00
Tu as donc également fixé le servo d'aileron sur ta jambe de train?
as tu guardé les élastiques de durcissement des commandes sur les deux axes?
Serrait il possible d'avoir plus d'infos sur ce dossier et que fais tu pendant ces 5 heures?
Et si tu as des photos je suis preneur.
Merci et bon vols
sylvain
navion78- Nombre de messages : 365
Localisation : LFPX, LFBX
Constr./proprio. : PROPRIO MCR n°17
Date d'inscription : 19/03/2008
Re: Pilote automatique
Dominique Lun 10 Jan 2011, 16:29
Pour les photos, c'est exactement le montage de admin et de François (voir plus haut sur le sujet) avec le servo de roulis sur la jambe de train.
Dominique- Nombre de messages : 315
Age : 74
Localisation : Cholet
Constr./proprio. : constructeur mcr01vla 14 co-constructeur mcr01UL 5 proprio MCR4S 87
Date d'inscription : 01/12/2008
Re: Pilote automatique
navion78 Lun 10 Jan 2011, 16:38
je vais donc me mettre au travail des qu'il fait moins froid dans le hangar
navion78- Nombre de messages : 365
Localisation : LFPX, LFBX
Constr./proprio. : PROPRIO MCR n°17
Date d'inscription : 19/03/2008
Re: Pilote automatique
RIAZUELO Lun 10 Jan 2011, 22:37
Je confirme après tous ceux qui on fait l'installation que DYNON a fait un truc mieux que bien, il est parfait !
Ce qui est remarquable, c'est la simplicité du montage (le fil rouge avec le fil rouge, le fil vert avec le fil vert, etc ..!) et l'adaptation immédiate à l'avion dès la première mise en service sans faire aucun réglage. Quand il est engagé on ne sens absolument pas le travail du PA, tout est fluide et doux. Le seul réglage important est celui du couple de commande du PA de façon à pouvoir "reprendre la main". On obtient une valeur très faible par rapport au réglage DYNON de base du fait de la légèreté du manche du MCR comparée à celle des camions qu'il peut aussi prendre en compte.
En ce qui me concerne je n'ai monté que le servo de roulis, car j'avais en tête depuis longtemps de faire un système pour la profondeur. Je ne peux pas en dire plus pour le moment, mais je ne regrette pas du tout le temps passé...
Passant après les pionniers (merci François !) j'ai pu m'inspirer de leurs réalisations et améliorer (je pense !) en faisant plus simple.



La liaison se fait par une biellette (celle que fourni DYNON pour les avions pour lesquels il n'y a pas de kit spécifique) allant directement du bras du servo au pied de manche. C'est mécaniquement impeccable et simple. Il suffit de négocier le mariage franco-américain au niveau du pied de manche. Pour le MCR biplace, il FAUT utiliser le trou intermédiaire du bras de servo. Cela correspond à un bon débattement du bras, gage de précision, sans risque de coincement quand le manche va en butée. DYNON alerte lourdement sur l'importance qu'il y a à écarter ce risque.
Remarques pour une utilisation optimum.
Le PA peut prendre ses informations de route ou cap de trois sources différence.
De son propre compas (mode HDG), d'un GPS (mode TRACK) ou d'un GPS qui est en mode GOTO ou qui est calé sur une route (mode NAV).
C'est bien sûr le mode NAV qui est le plus spectaculaire, que cela soit pour rejoindre un point ou pour s'aligner sur un axe.
Mais, dans la pratique, en VFR, on n'est jamais sur la route prévue. Soit on a une sale météo et on passe où on peut, soit il fait beau et on coupe tout droit !
A mon sens, donc, c'est le mode TRACK qui est le plus utile. Avec le GPS on connait la route à suivre, il suffit de l'afficher sur le DYNON et ça roule.
Par exemple, à 10 Nm du prochain WP, on sélectionne le suivant, on connait donc la route directe à suivre pour le rejoindre, on affiche pour le PA, et c'est tout bon.
C'est le mode TRACK qui par mauvaise météo permet d'analyser la carte et la situation sans que l'avion en profite pour se barrer ... Bien sûr ceux à qui cela n'arrive jamais ne percevront pas l'intérêt de la chose !
Ceci établi, j'ai connecté à mon D10A un GPS souris filaire (liaison série) que j'avais avant de passer au GPS BT, et je n'utilise plus que le mode TRACK.

RIAZUELO- Nombre de messages : 1314
Localisation : CHOLET LFOU
Constr./proprio. : Constructeur VLA F-PMTR
Date d'inscription : 23/07/2009
Re: Pilote automatique
Pierre-Andre Mar 11 Jan 2011, 08:12
Je profite du sujet du PA pour vous souhaiter à tous , et à vos MCR, une bonne année 2011.
J'espère que l'on se retrouvera souvent dans les rassemblements, surtout qu'avec un PA, plus d'excuses pour ne pas y aller!
Je fignole le TdB "modulaire" du SkyCruiser, et va donc bientot venir le temps du PA.
Cdlt
PA (full PA, et PA connected!)

Pierre-Andre- Nombre de messages : 491
Age : 70
Localisation : Albertville - Savoie
Constr./proprio. : MCR01-ER SKY-CRUISER F-PVTZ 912S/PV/AP/Parachute/ADSB/Ox
Date d'inscription : 03/08/2010
Re: Pilote automatique
Pierre-Andre Mar 26 Juil 2011, 20:46
Je déterre provisioirement le sujet du PA pour vous annoncer que j'ai reçu le servo SV32 et l'AP74 !
Me reste à profiter honteusement de toute l'expérience accumulée par les courageux qui se sont lancés dans la manip avant moi pour le montage sur mon VLA/Sky-Cruiser.
Le montage attendra sans doute les mauvais jours, mais j'ai hate tout de même de voir le résultat!
PA+
Pierre-Andre- Nombre de messages : 491
Age : 70
Localisation : Albertville - Savoie
Constr./proprio. : MCR01-ER SKY-CRUISER F-PVTZ 912S/PV/AP/Parachute/ADSB/Ox
Date d'inscription : 03/08/2010
Re: Pilote automatique
Admin Mar 26 Juil 2011, 20:50
Tiens-nous au courant...
Admin- Admin
- Nombre de messages : 1577
Localisation : Chavenay (LFPX)
Constr./proprio. : Co-proprio MCR4S. Ex-proprio d'un VLA et d'un ULC remorqueur planeur
Date d'inscription : 09/03/2008 -
Re: Pilote automatique
Pierre-Andre Lun 14 Mai 2012, 10:42
Depuis le dernier post du 26 juillet, mon PA a été monté !
A la sortie de l'hiver, le roulis était monté, et un essai en mars s'est avéré concluant (en mode HDG).
Je me suis alors laissé convaincre par Dominique que de monter le servo de profondeur n'était pas un gros travail, et en plus a lot of fun à l'utilisation!
Donc j'ai replongé dans l'achat et l'installation du servo de profondeur en avril, et aussi branché le GPS sur le D10A.
Je suis donc maintenant équipé des 2 axes, avec tous les modes possibles, et bien sûr, c'est bien a lot of fun!
Reste un problème dont je n'ai pas trouvé la solution. En mode NAV, mon vieux Garmin 296 ne semble pas prévenir l'EFIS qu'un waypoint approche, et qu'il serait bien d'anticiper le virage... Donc overshoot, virage sur l'aile, système asservi non amorti, etc, et enfin après 2mn je suis sur le nouveau leg. Mais que c'est laborieux ! (pas lot of fun)
Donc HELP : comment lui faire anticiper le passage d'un waypoint ?
PA+ (2 axes!)
Pierre-Andre- Nombre de messages : 491
Age : 70
Localisation : Albertville - Savoie
Constr./proprio. : MCR01-ER SKY-CRUISER F-PVTZ 912S/PV/AP/Parachute/ADSB/Ox
Date d'inscription : 03/08/2010
Pilote automatique
francois fisse Lun 14 Mai 2012, 12:23
Le PA Dynon EFIS D10 A + 2 servos ne permet pas , avec le logiciel actuel ,en NAV ( par GPS couplé type 295 ou similaire) d'anticiper avant chaque waypoint, le cap du segment suivant . Donc le phénomène décrit est bien le correct .
Les PA Tru Trak de haute gamme ( type Digiflight II VSGV) couplé avec un GPS de haute volée ( style Garmin 480..$ 10000) permet cette fonction appelée GPS Steering .
Par contre il y a un moyen de le faire manuellement au juger.
Avant d'arriver sur le waypoint, préparer avec l' AP 74 un HDG correspondant au cap du segment suivant , puis basculer le PA de NAV à HDG ; attendre que le cap HDG soit atteint et alors rebasculer sur le mode NAV,
Cela demande un peu de doigté mais avec l'habitude le résulat est acceptable comparé à la somme à investir ( GPS + PA) pour exécuter cette tache automatiquement
François Fissé
francois fisse- Nombre de messages : 38
Localisation : versailles
Constr./proprio. : constructeur et propriétaire
Date d'inscription : 19/06/2008
Re: Pilote automatique
Pierre-Andre Lun 14 Mai 2012, 13:15
J'avais bien pensé que le GPS n'enverrait pas au PA le leg à venir, donc du coup, et bien que le PA sache que le waypoint s'approche (distance), il ne sait quel sera la prochaine route à suivre, et du coup ne sait pas anticiper le virage.
Pourtant, un post de pschlappy dit : "En mode NAV avec le Garmin 695 les legs sont suivis au degré près avec une anticipation des changements de cap parfaite... ". Le 696 enverrait-il une sentence NMEA indiquant le Next Course ?
Aussi, j'avais bien pensé faire la fonction virage anticipé en me servant du mode HDG, en armant celui-ci avec le nouveau cap (avec l'AP74), puis le jeu consistant à passer en mode HDG au moment opportun avant le waypoint pour ressortir pile sur la nouvelle route, et repasser à ce moment là en mode NAV ! Après le pilotage aux fesses, le pilotage du PA, le mode Manche étant désormais banni!
PA (2 axes, mais avec overshoot!)
Pierre-Andre- Nombre de messages : 491
Age : 70
Localisation : Albertville - Savoie
Constr./proprio. : MCR01-ER SKY-CRUISER F-PVTZ 912S/PV/AP/Parachute/ADSB/Ox
Date d'inscription : 03/08/2010
Re: Pilote automatique
francois fisse Lun 14 Mai 2012, 13:58
De plus lors de faibles changements de cap ( 5° à 10) entre deux segments, l'anticipation n'apporterait pas grand chose.
Autre point, quel logiciel as-tu sur ton EFIS D 10A ( 5.3 ou 5.4) ? Pour ton info, je n'ai eu que des déboires avec le 5.4, me calant l'alti à + 50 ft au dessus de la consigne quelque soient les réglages des X paramètres. Du coup, je suis revenu au 5.3 ( 2 paramètres) et dans le calme l'alti est maintenue à +/- 10 ft près
A Bagnoles si le temps le permet.. je vise Jeudi
François Fissé
francois fisse- Nombre de messages : 38
Localisation : versailles
Constr./proprio. : constructeur et propriétaire
Date d'inscription : 19/06/2008
Re: Pilote automatique
Pierre-Andre Lun 14 Mai 2012, 14:35
Le 5.4 ne semble pas apporter grand chose.
PA
Pierre-Andre- Nombre de messages : 491
Age : 70
Localisation : Albertville - Savoie
Constr./proprio. : MCR01-ER SKY-CRUISER F-PVTZ 912S/PV/AP/Parachute/ADSB/Ox
Date d'inscription : 03/08/2010
Re: Pilote automatique
francois fisse Lun 14 Mai 2012, 14:52
François Fissé
francois fisse- Nombre de messages : 38
Localisation : versailles
Constr./proprio. : constructeur et propriétaire
Date d'inscription : 19/06/2008
Page 5 sur 6 • 1, 2, 3, 4, 5, 6
» Règlage Pilote automatique Dynon?
» Pilote automatique Dynon D10A AP74 SV32
» Pilote auto DIGIFLIGHT II - TRUTRAK : jeu acceptable sur axe servomoteur DSP-B ?
» recherche schéma technique de l'API iaero
Le MCR 01: notre passion partagée :: Construction :: Pendant la construction et l'évolution de votre MCR :: Instrumentation et avionique :: Pilote automatique